
Een robotstofzuiger “ziet” je woning niet zoals jij, maar navigeert met een combinatie van sensoren (bots-, val- en wanddetectie), soms een camera, vaak LiDAR (laser), en software die een kaart maakt en vervolgens slimme routeplanning toepast. In dit artikel leg ik uit hoe die kaarttechnologie werkt, welke navigatietypes er zijn (random vs. systematisch), wat AI en obstakeldetectie écht doen, en waar je op moet letten als je een model kiest voor jouw woningtype (tapijt, drempels, stoelen, meerdere verdiepingen).
Waarom navigatie het verschil maakt
Navigatie is het brein van je robotstofzuiger. De zuigkracht bepaalt hoeveel vuil hij kan opnemen, maar navigatie bepaalt of hij overal geraakt, hoeveel tijd hij nodig heeft, en hoe vaak hij vastloopt of plekken overslaat. Een robot met slimme navigatie werkt systematischer, maakt een kaart van je huis, en kan doelgericht kamers schoonmaken. Een eenvoudiger model rijdt vaker “kriskras” en is dus minder voorspelbaar.
De basis: welke sensoren zitten er in een robotstofzuiger?
Elke robotstofzuiger gebruikt meerdere sensoren tegelijk. Zelfs de eenvoudigste toestellen combineren al een paar detectiesystemen om niet van de trap te vallen of zich klem te rijden. Hieronder de belangrijkste “zintuigen” die je in de praktijk tegenkomt.
Val- en trapdetectie (cliff sensors)
Onder de robot zitten infraroodsensoren die de afstand tot de vloer meten. Ziet de robot plots “geen vloer” (bij een trapgat), dan stopt hij en draait hij weg. In fel zonlicht of op hoogglanzende, zwarte vloeren kunnen sommige sensoren minder betrouwbaar zijn; dat is geen fout van één merk, maar een bekende beperking van IR-metingen.
Bots- en bumperdetectie
Bij veel robots is de voorbumper een mechanische schakelaar: als hij iets raakt, weet hij dat er een object is en stuurt hij bij. Dit is effectief, maar het betekent ook dat hij soms eerst lichtjes “tikt” tegen stoelpoten of plinten. Duurdere robots proberen dit te vermijden met afstandssensoren en/of camera’s.
Wand- en afstandssensoren (IR/ultrasoon)
Om langs muren te rijden zonder constant te botsen, gebruiken robots vaak nabijheidssensoren. Zo kunnen ze “wall-following” doen: netjes langs randen en plinten, waar stof zich vaak ophoopt.
Wielsensoren en IMU (odometrie)
De robot telt hoe ver de wielen gedraaid hebben (odometrie) en combineert dat soms met een IMU (gyroscoop/accelerometer) om bochten en beweging te schatten. Dit helpt om een route te reconstrueren, maar op zichzelf is het niet nauwkeurig genoeg: slippen op tapijt of drempels veroorzaakt meetfouten. Daarom gebruiken betere robots extra “referenties” zoals LiDAR of camera’s om te corrigeren.
Van “random rijden” naar systematisch schoonmaken
Niet elke robotstofzuiger maakt een kaart. Er zijn grofweg twee manieren van navigatie, met duidelijke gevolgen voor dekking, tijd en gebruiksgemak.
Random navigatie (chaotisch patroon)
Dit zijn vaak instapmodellen. Ze rijden een stuk rechtdoor, botsen, draaien, en herhalen dat. Ze kunnen uiteindelijk veel vloer raken, maar je hebt minder garantie op volledige dekking binnen een voorspelbare tijd.
- Voordeel: vaak goedkoper, minder complex.
- Nadeel: minder efficiënt, vaker dubbel werk, meer kans op gemiste zones.
Systematische navigatie (kaart maken + banen rijden)
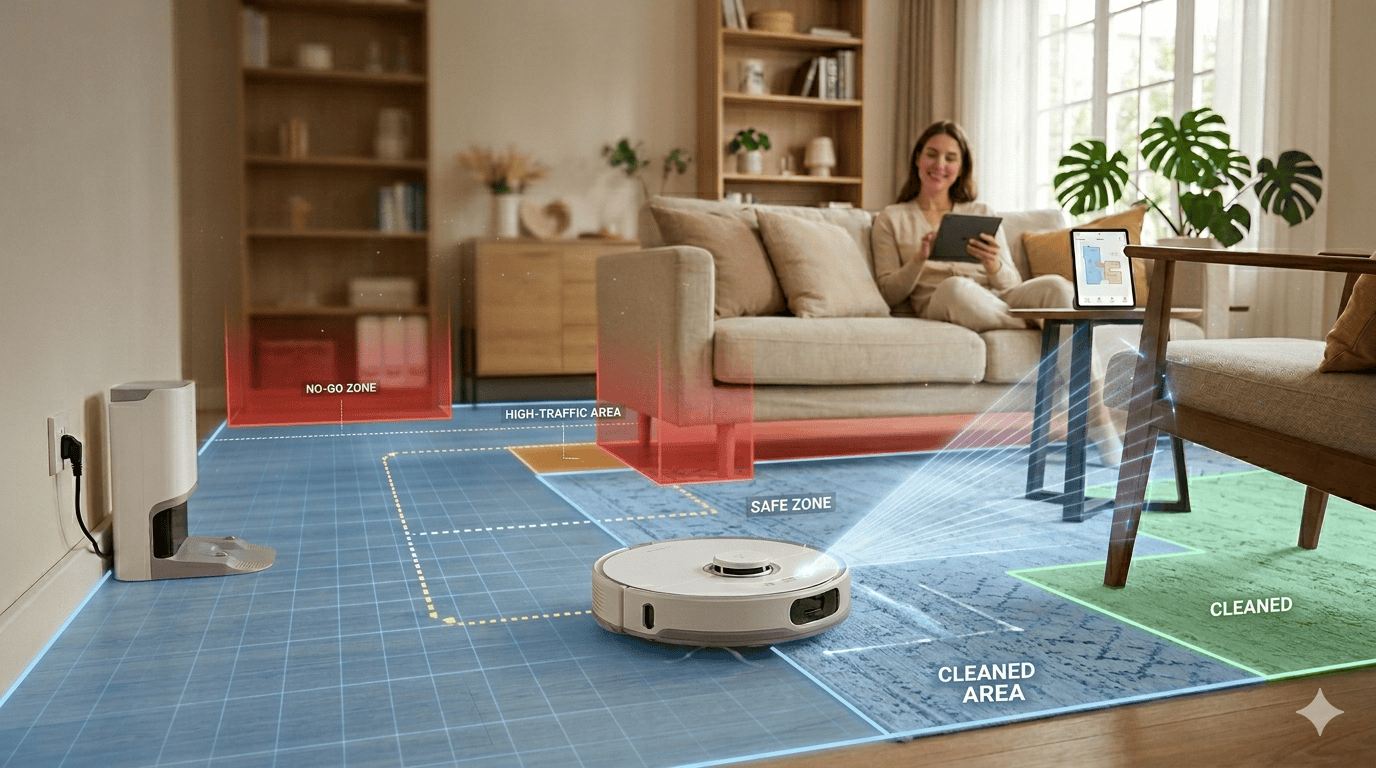
Hier maakt de robot een plattegrond en reinigt hij in logische banen (zoals jij zou stofzuigen). Dat is efficiënter en maakt functies mogelijk zoals kamerselectie, no-go zones en gerichte spot cleaning.
- Voordeel: sneller klaar, beter herhaalbaar, veel meer controle via app.
- Nadeel: hoger prijsniveau, meer afhankelijk van sensoren en software.
Kaart maken: hoe “kent” de robot jouw woning?
Kaart maken is meestal gebaseerd op SLAM: Simultaneous Localization and Mapping. Dat betekent: tegelijk bepalen waar de robot is (localization) én een kaart opbouwen (mapping). In de robotica is SLAM een klassiek onderzoeksdomein; veel fabrikanten bouwen hierop voort in hun eigen implementaties.
LiDAR-navigatie (laser + SLAM)
Bij LiDAR (Light Detection and Ranging) zit bovenop de robot vaak een ronddraaiende “toren”. Die schiet laserpulsen rond en meet hoe lang het licht erover doet om terug te keren. Zo krijgt de robot een zeer nauwkeurige afstandsring rond zich en kan hij muren, hoeken en obstakels geometrisch in kaart brengen.
Wat je merkt in huis: LiDAR-robots zijn doorgaans sterk in systematisch schoonmaken, werken vaak ook goed bij weinig licht, en bouwen snel een stabiele kaart op. Nadelen: ze kunnen lage objecten (zoals een platte schaal) soms minder goed “zien” en de toren maakt de robot hoger (onder lage zetels kan dat tellen).
Cameranavigatie (VSLAM)
Sommige robots gebruiken een camera (meestal bovenaan of aan de voorkant) om visuele kenmerken te herkennen: randen, patronen, deurposten. Dit wordt vaak VSLAM genoemd (Visual SLAM). Met beelden kan de robot zijn positie schatten en tegelijk de kaart bijwerken.
In de praktijk: cameragebaseerde navigatie kan erg goed werken, maar is gevoeliger voor omstandigheden zoals weinig licht, sterke tegenlichtsituaties of monotone vloeren zonder herkenbare kenmerken. Als je wil weten wat je in real life mag verwachten, lees ook of een robotstofzuiger in het donker of ’s nachts werkt.
Hybride systemen: LiDAR + camera + sensoren
Veel moderne toestellen combineren meerdere bronnen: LiDAR voor globale kaart en positionering, plus een frontcamera of 3D-sensoren voor obstakeldetectie (kabels, sokken, huisdierongelukjes). Dit is vaak de beste mix voor “slimme navigatie”, maar ook het duurste segment.
Routeplanning: hoe beslist de robot waar hij eerst rijdt?
Zodra er een kaart is, komt routeplanning in beeld: de robot splitst je woning op in zones en kiest een schoonmaakstrategie die dekking maximaliseert en tijd minimaliseert.
Ruimte-indeling en kamerherkenning
De app toont meestal een kaart waarop je kamers kan opdelen of samenvoegen. De robot herkent vaak zelf kamers op basis van doorgangen en muurstructuren, maar jij kan die indeling verfijnen. Dat is handig als je bijvoorbeeld enkel de keuken wil doen na het koken.

Patronen: banen, randen, en “spot cleaning”
- Banen rijden: de robot werkt in parallelle stroken voor volledige dekking.
- Randmodus: eerst langs plinten en rond tafelpoten, daarna het midden.
- Spot cleaning: een kleine zone intensief reinigen (bij kruimels).
Terugkeren naar laadstation en hervatten
Bij grotere woningen is “recharge & resume” belangrijk: de robot onthoudt waar hij gebleven is, laadt bij, en gaat verder. Dit is typisch gekoppeld aan kaartnavigatie; bij random modellen is hervatten minder precies.
Obstakeldetectie en “AI”: wat betekent dat concreet?
“AI” in robotstofzuigers is vaak een verzamelterm. Waar het vooral neerkomt op: objecten sneller herkennen en vermijden, zodat je minder moet opruimen vóór de robot start.
Welke obstakels herkent een robot (soms) echt?
Dat verschilt sterk per model en generatie, maar de moeilijkste objecten zijn bijna altijd:
- Kabels en ladersnoeren
- Sokken en kleine speeltjes
- Franjes van tapijten
- Huisdierongevallen (hier wil je echt maximale detectie)
Robots met geavanceerde obstakeldetectie gebruiken vaak een frontcamera en/of dieptesensoren om objecten te classificeren en er netjes rond te rijden. Toch raad ik aan om kritieke risico’s (kabels, veters) als basisroutine weg te nemen: dat blijft de meest betrouwbare “preventie”. Wil je daar dieper op ingaan, bekijk dan wat een robotstofzuiger wel en niet als obstakel herkent.
Voor- en nadelen per navigatietechnologie
Als je snel wil vergelijken, helpt deze tabel. Let op: fabrikanten combineren technologieën, dus kijk ook naar de totale uitvoering (software + sensoren), niet alleen naar één label.
| Navigatie/kaarttechnologie | Voordelen | Nadelen | Beste voor |
|---|---|---|---|
| Random (zonder kaart) | Goedkoper, simpel in gebruik | Minder efficiënt, minder controle, vaker gemiste zones | Kleine ruimtes, beperkte verwachtingen |
| LiDAR + SLAM | Snel en nauwkeurig kaart maken, werkt goed bij weinig licht, efficiënte routeplanning | Robot is vaak hoger, lage/platte objecten niet altijd perfect | Meerdere kamers, voorspelbare dekking, drukke huishoudens |
| Camera + VSLAM | Goede kaart mogelijk zonder “toren”, kan visuele cues benutten | Gevoeliger voor donkerte/tegenlicht; privacy-perceptie kan meespelen | Wie lage robot zoekt, redelijk constante lichtomstandigheden |
| Hybride (LiDAR + camera/3D) | Beste totaal: sterke kaarten én obstakelvermijding | Duurder; meer afhankelijk van software-updates | Huizen met veel obstakels, kinderen/huisdieren, kabels |
Wat betekent dit voor jouw woning? Praktische scenario’s
De beste keuze hangt minder af van marketingtermen en meer van je vloerplan en leefstijl. Ik help je graag met een paar herkenbare situaties.
Veel stoelen, tafelpoten en een druk interieur
Dan wil je vooral dat de robot vlot om obstakels heen kan en niet constant de bumper gebruikt. Mijn advies: kies voor kaartnavigatie en bij voorkeur betere obstakeldetectie. Dat scheelt frustratie én voorkomt vastlopen.
Meerdere verdiepingen
Let op “multi-floor mapping”: sommige robots kunnen meerdere kaarten bewaren. Dat is handig als je de robot ook boven gebruikt. Zonder die functie moet je soms telkens opnieuw laten mappen of verlies je no-go zones per verdieping.
Drempels en overgangen
Drempels zijn minder “navigatie” en meer “mobiliteit”, maar het beïnvloedt de routeplanning: als de robot een drempel niet over raakt, beschouwt hij die zone als onbereikbaar. Check daarom de maximale drempelhoogte in de specificaties en hou rekening met tapijtranden.
Donkere vloeren of veel zonlicht
Donkere, glanzende vloeren kunnen valdetectie triggeren alsof er een trap is. Sterke zon op de vloer kan IR-sensoren ook beïnvloeden. Als je dit ervaart, kan het helpen om schoon te maken op momenten met minder direct zonlicht en de sensoren proper te houden.
Merken en benaderingen (algemeen, zonder verkooppraat)
Verschillende fabrikanten leggen andere accenten: de ene op kaartkwaliteit, de andere op obstakeldetectie of op appfuncties. Hieronder een neutraal overzicht van bekende spelers en waar ze vaak op inzetten. Controleer altijd het exacte model, want binnen één merk verschillen generaties sterk.
| Merk (voorbeelden) | Waar ze vaak op inzetten | Waar jij op moet letten |
|---|---|---|
| iRobot Roomba | Gebruikservaring, ecosystemen, kamerfuncties (modelafhankelijk) | Navigatietype verschilt per reeks; vergelijk kaarten en routeplanning per model |
| Roborock | Vaak LiDAR-kaarten en uitgebreide app-routeplanning | Check obstakeldetectie per model; niet elke LiDAR-robot vermijdt kabels goed |
| Ecovacs | Combinaties van kaarttechnologie en obstacle-avoidance in veel lijnen | Software-ervaring kan per generatie verschillen; kijk naar recente reviews/updates |
| Dreame / Xiaomi (ecosysteem) | Veel modellen met LiDAR en scherpe prijs-kenmerkenverhouding | Let op app, taal/regionale instellingen en beschikbaarheid van onderdelen |
| Dyson (robotmodellen beperkt) | Technische benadering; modelaanbod wisselt | Controleer actuele beschikbaarheid en kaartenfunctionaliteit per model |
Kostenplaatje: wat betaal je voor betere navigatie?
Prijzen fluctueren sterk door promoties, maar ik kan je wél een realistisch denkmodel geven: je betaalt meestal extra voor (1) betrouwbare kaartnavigatie, (2) obstakeldetectie, (3) automatisch legen/dweilen en (4) softwarefuncties. Navigatie is daarbij één van de grootste “kwaliteitshefbomen”.
| Segment (indicatief) | Wat je meestal krijgt | Wat je vaak mist |
|---|---|---|
| Budget: ± €150–€250 | Basis sensoren, eenvoudige navigatie, soms rudimentaire mapping | Stabiele kaarten, kamerselectie, goede obstakelvermijding |
| Midden: ± €250–€500 | Vaker LiDAR of degelijke mapping, betere routeplanning, no-go zones | Top obstakeldetectie, docking met auto-legen (niet altijd) |
| Hoger: ± €500–€1.000+ | Hybride navigatie, betere objectherkenning, krachtige app, vaak premium docks | — |
Rekenvoorbeeld: stel dat een betere navigatie je per schoonmaakbeurt 20 minuten bespaart en je laat 4 keer per week draaien. Dat is 80 minuten per week, ongeveer 69 uur per jaar. Als het prijsverschil €300 is, “kost” die tijdswinst je ongeveer €4,35 per uur in het eerste jaar (puur als denkoefening). Als je nog twijfelt of “beter navigeren” de meerprijs waard is, helpt dit ook: vanaf welk budget een robotstofzuiger echt de moeite waard is.
Veelgestelde vragen over navigatie, kaart maken en routeplanning
Hoe weet een robotstofzuiger waar hij al geweest is?
Bij slimme navigatie onthoudt hij zijn positie op een kaart via SLAM (LiDAR en/of camera) en combineert dat met wielsensoren. Zo markeert hij schoonmaakbanen als “gedaan” en plant hij de volgende strook zonder onnodige herhaling.
Kan een robotstofzuiger navigeren in het donker?
LiDAR-robots kunnen meestal prima in het donker omdat ze zelf met laser meten. Cameragebaseerde systemen hebben vaker licht nodig om visuele kenmerken te herkennen. In de praktijk werkt schemer vaak nog, maar pikdonker kan de prestaties verminderen.
Waarom botst mijn robot soms toch, zelfs met slimme navigatie?
Omdat niet elke robot echte obstakeldetectie heeft. Kaartnavigatie zegt vooral waar muren en kamers zijn; kleine objecten vragen extra sensoren of camera-AI. Ook transparante of glanzende oppervlakken kunnen lastiger te detecteren zijn.
Maakt de robot elke keer opnieuw een kaart?
Bij modellen met permanente mapping bewaart hij de kaart en gebruikt die bij elke rit. Soms doet hij wel een “kaartupdate” als meubels verplaatst zijn. Instapmodellen zonder mapping bouwen meestal niets op dat ze blijvend bewaren.
Hoe betrouwbaar zijn no-go zones en virtuele muren?
Als de kaart stabiel is (vaak bij LiDAR) werken no-go zones doorgaans goed. Bij onstabiele mapping of veel verschuivende meubels kan de grens soms “driften”. Ik raad aan zones na een herinrichting even te controleren in de app.
Checklist: zo haal je het meeste uit navigatie in het dagelijks gebruik
Zelfs met goede kaartnavigatie kan de praktijk tegenvallen als de basis niet klopt. Plaats het laadstation op een plek met voldoende “vrije ruimte” (links/rechts en vooral vóór het station), en vermijd dat het dock krap tussen meubels staat. Als je robot regelmatig naast het dock eindigt of blijft zoeken, ligt dat vaak aan de opstelling of aan storende signalen; in dat geval is waarom je robotstofzuiger zijn station niet terugvindt een handige troubleshoot-gids.
Hou ook je vloer “robotproof” op de drukste plekken: losse kabels, franjes en kleine objecten veroorzaken de meeste onderbrekingen. Je hoeft niet steriel op te ruimen, maar één snelle ronde met een vaste routine bespaart veel vastlopers (en frustratie). Wil je dat concreet maken, lees dan of je moet opruimen voor je robotstofzuiger aanzet.
Bronnen en autoriteit: waar is dit op gebaseerd?
De termen en principes in dit artikel (zoals SLAM en sensortypes) komen uit de bredere robotica- en navigatieliteratuur en uit publieksinformatie van fabrikanten. Voor achtergrond kun je o.a. terecht bij Wikipedia over Simultaneous localization and mapping (SLAM) en bij technische uitleg van sensorprincipes (LiDAR, infrarood) zoals die algemeen beschreven worden in elektronica- en robotica-overzichten. Voor aankoopbeslissingen raad ik aan om daarnaast onafhankelijke tests te lezen (bijv. Consumentenorganisaties en gespecialiseerde reviewsites) omdat uitvoering per model sterk verschilt.
Conclusie
Een robotstofzuiger navigeert door je huis door sensoren te combineren met software die een kaart maakt en routeplanning uitvoert. Wil je voorspelbare dekking en controle per kamer, dan is systematische navigatie met mapping (vaak LiDAR of camera-VSLAM) de belangrijkste upgrade. Mijn advies: kies je robot niet op zuigkracht alleen, maar kijk vooral naar kaartkwaliteit, obstakeldetectie en de app-functies die passen bij jouw woning en dagelijkse routine.



