
Een robotstofzuiger werkt volgens een combinatie van sensoren (voor obstakels, afgronden en positionering), een zuigmotor met borstels (voor het opnemen van stof en vuil), een navigatiesysteem (random, gyroscopisch of LiDAR/camera-gebaseerd) en slimme algoritmes die bepalen waar hij al geweest is en waar hij nog moet reinigen. In dit artikel leg ik je stap voor stap het principe, de technologie en het mechanisme uit, inclusief praktische tips, vergelijkingen, voor- en nadelen, en antwoorden op veelgestelde vragen.
De basis: wat doet een robotstofzuiger precies?
Een robotstofzuiger is in essentie een compacte, autonome stofzuiger die zelfstandig door je woning rijdt en vuil opzuigt in een interne stofbak. De werking steunt op twee kernfuncties: reinigen (borstels + zuigkracht + filter + stofreservoir) en oriënteren (sensoren + navigatie + software). Alles samen bepaalt hoe efficiënt hij je vloer schoon krijgt, hoe vaak hij vastloopt en hoe “slim” de rit aanvoelt.
Het mechanisme in één zin
De robot meet zijn omgeving met sensoren, plant (of improviseert) een route met algoritmes, rijdt met motoren en wielen, veegt vuil naar de zuigmond met borstels, en zuigt het op in een stofbak die je periodiek leegt of automatisch laat legen via een dock.
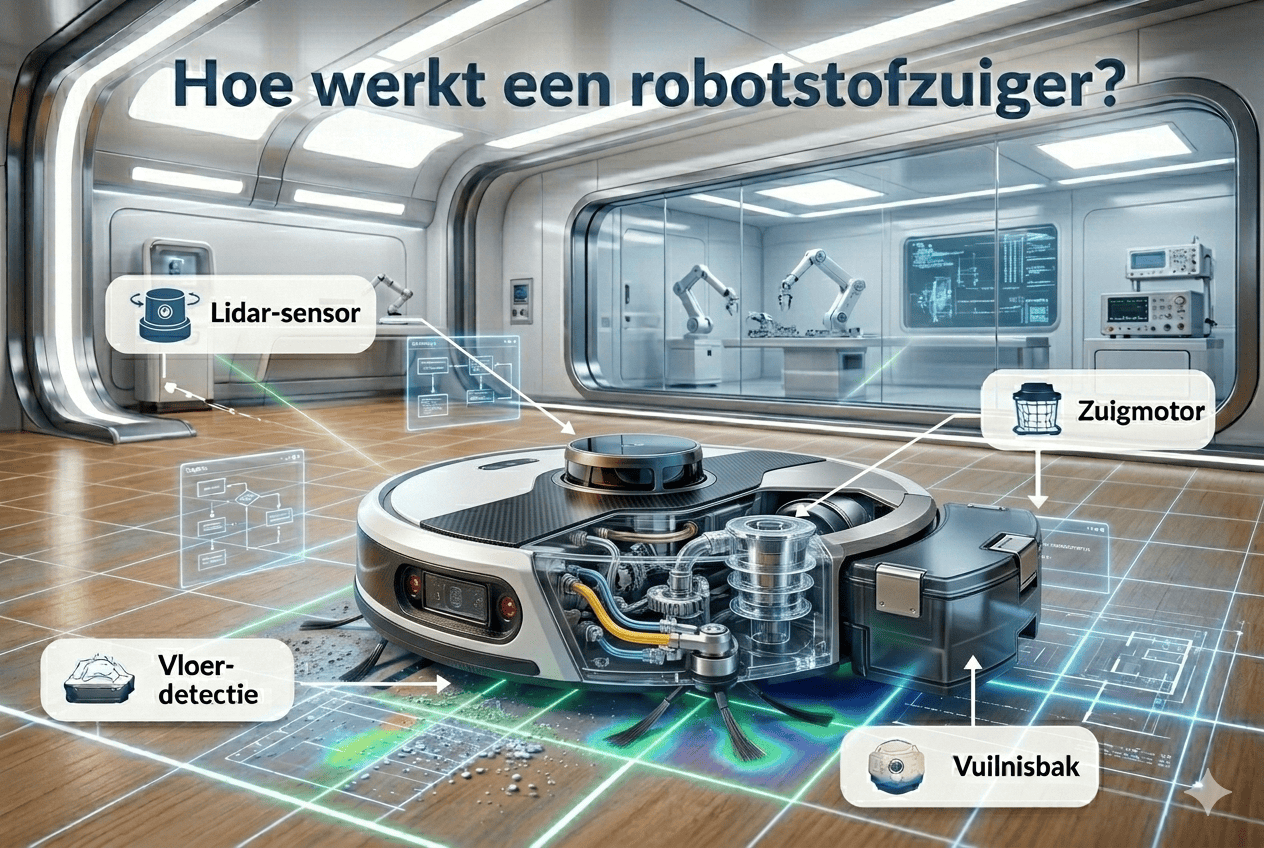
De belangrijkste onderdelen en hun functie
Om de technologie te begrijpen, helpt het om de robotstofzuiger te zien als een klein systeem met duidelijke modules. Hieronder leg ik uit wat elk onderdeel doet en hoe dat bijdraagt aan de werking.
1) Aandrijving: wielen, motoren en ophanging
Robotstofzuigers hebben doorgaans twee aangedreven hoofdwielen (links en rechts) met aparte motoren, plus een zwenkwieltje. Door het toerental van de wielen te variëren kan de robot draaien, bochten maken of in rechte lijnen rijden. Een eenvoudige ophanging helpt drempels of tapijtranden te nemen, maar té hoge overgangen blijven een klassiek probleem.
2) Reiniging: zijborstel, hoofdborstel en zuigmotor
Het schoonmaakprincipe bestaat meestal uit drie stappen. De zijborstel veegt vuil langs randen en uit hoeken naar binnen. De hoofdborstel (rubber, haren of een combinatie) klopt en trekt vuil los, vooral uit tapijt. De zuigmotor creëert luchtstroom die stof en kruimels richting stofbak trekt.
Waarom borstels minstens zo belangrijk zijn als “Pa” (zuigkracht)
In marketing zie je vaak hoge “Pa”-waarden. Dat zegt iets over maximale onderdruk, maar in de praktijk bepaalt de combinatie van borstelontwerp, luchtkanaal, afdichting en filter hoe goed fijn stof én grover vuil effectief in de bak belandt. Daarom presteert een goed ontworpen robot soms beter dan een “krachtiger” model op papier. Wil je dat begrip echt goed kunnen vergelijken tussen modellen, lees dan ook wat Pa (Pascal) bij zuigkracht in de praktijk betekent.
3) Filter en stofreservoir (en soms een automatisch leegstation)
Opgezogen vuil komt in een stofbak met filter, vaak een HEPA-achtig filter (terminologie verschilt per fabrikant). Het filter houdt fijne deeltjes tegen zodat ze niet terug de kamer in waaien. Bij modellen met leegstation zuigt het dock de stofbak automatisch leeg in een grotere zak of container. Dat verhoogt comfort, maar brengt extra kosten en onderhoud mee.
4) Stroomvoorziening: batterij en laadstation
De meeste robotstofzuigers gebruiken lithium-ion batterijen. Het laadstation (dock) fungeert als “thuisbasis”. Wanneer de batterij bijna leeg is, berekent de robot of hij nog kan doorwerken of beter terugkeert om te laden. Veel modellen hervatten daarna automatisch (“recharge & resume”), wat vooral bij grotere woningen belangrijk is.
Sensoren: zo “voelt” een robotstofzuiger de wereld
De sensorlaag is het verschil tussen een robot die willekeurig rondbotst en een robot die methodisch reinigt. In de praktijk werken meerdere sensoren samen, elk met een eigen principe.
Afgrond- en valdetectie (cliff sensors)
Onder de robot zitten vaak infraroodsensoren die detecteren of de vloer plots “verdwijnt” (trapgat). Zien ze geen reflectie, dan stopt de robot of draait hij om. Donkere vloeren of glanzende oppervlakken kunnen soms foutdetecties geven, afhankelijk van kalibratie en sensorkwaliteit.
Bumpers en nabijheidssensoren
Een fysieke bumper registreert aanraking met obstakels. Daarnaast gebruiken veel robots infrarood of ultrasoon voor nabijheidsmeting, zodat ze al vertragen vóór contact. Dit beïnvloedt hoe zacht de robot tegen meubels rijdt en hoe goed hij rond fragile objecten navigeert.
Wiel-encoders en IMU (gyroscoop/versnellingsmeter)
Wiel-encoders meten hoeveel een wiel draait; een IMU meet draaiing en versnelling. Samen schatten ze afstand en richting. Dat helpt om rechter te rijden, systematischer te reinigen en de kaart bij te houden, al stapelt meetfout na verloop van tijd op zonder externe referentie (zoals LiDAR of camera).
LiDAR (laser) of camera (visual) navigatie
Geavanceerde modellen gebruiken LiDAR (laserafstandmeting) bovenop de robot (de bekende “toren”) of geïntegreerd in de behuizing. LiDAR scant de omgeving en bouwt een kaart. Andere robots gebruiken een camera (visual SLAM) om kenmerken in de ruimte te herkennen. Beide systemen ondersteunen nauwkeurige mapping en zone-reiniging.
Objectherkenning (AI)
Sommige robots combineren camera’s met AI-modellen om objecten te herkennen (bijv. kabels, schoenen, huisdier-ongelukjes) en ze te vermijden. Dit blijft afhankelijk van licht, camerahoek en de kwaliteit van de trainingsdata. Ik raad aan om “AI object avoidance” als hulp te zien, niet als garantie.
Navigatie en algoritmes: het echte “brein” achter de werking
Wanneer je weet welke sensoren er zijn, is de volgende stap: hoe beslist de robot waar hij rijdt? Dat gebeurt met algoritmes: regels en rekenmodellen die van sensordata een routeplan maken.
Random (willekeurige) navigatie: simpel maar inefficiënt
Bij instapmodellen zie je vaak random of semi-random patronen: rijden, botsen, draaien, verder rijden. Het voordeel is eenvoud en lagere prijs. Nadelen: meer dubbele passages, soms gemiste zones, en langer bezig voor hetzelfde resultaat.
Systematische navigatie met gyroscoop/IMU
Een stap beter is systematisch reinigen in banen (zoals maaien). De robot gebruikt IMU en encoders om rechte lijnen te rijden en logisch te draaien. Dit is meestal sneller en netter dan random, maar zonder echte mapping kan hij nog steeds “denken” dat hij klaar is terwijl hij een hoek overslaat.
Mapping met SLAM (LiDAR of camera): efficiënt en controleerbaar
Bij mapping gebruikt de robot SLAM-technieken (Simultaneous Localization and Mapping): tegelijk de omgeving in kaart brengen én zichzelf lokaliseren. Het resultaat: een kaart in de app, kamers die je kan benoemen, no-go zones, virtuele muren en gerichte reiniging (bv. enkel keuken na het koken).
Routeplanning en dekkingslogica
Een robot met mapping hakt de ruimte vaak op in “cellen” of stroken en plant een dekkingstraject. Hij herkent waar hij al geweest is en optimaliseert om tijd en batterij te besparen. In de praktijk merk je dat aan minder doelloos draaien en minder gemiste randjes, zeker in grotere of complexere ruimtes.
De werking bij drempels, tapijten en randen
In echte woningen wordt de technologie pas interessant: tapijten, stoelen, deurmatten, drempels en kabels bepalen of een robot aangenaam werkt of vooral frustratie geeft.
Drempels en overgangen
Fabrikanten geven vaak een maximale klimhoogte op (bv. rond 1,5–2 cm, afhankelijk van model en omstandigheden). In de praktijk spelen ook grip, wielprofiel en de hoek van de overgang mee. Als je veel (hoge) drempels hebt, kies ik liever een model met bewezen klimcapaciteit en goede tractie.
Tapijtboost en tapijtherkenning
Veel robots herkennen tapijt via weerstand, sensoren of luchtstroom en verhogen automatisch de zuigkracht (“carpet boost”). Dat verbetert de opname, maar verbruikt meer batterij en kan meer lawaai maken. Bij hoogpolig tapijt kan de hoofdborstel vastlopen of het chassis schrapen.
Rand- en hoekreiniging
Omdat een robot rond is, blijft hoekreiniging lastig. De zijborstel compenseert dat, maar in diepe hoeken is het resultaat nooit identiek aan handmatig stofzuigen met een smalle zuigmond. Als je veel hoeken en plinten belangrijk vindt, let dan op randprestaties in onafhankelijke tests.
Robotstofzuiger met dweilfunctie: hoe werkt dat dan?
Veel modellen combineren stofzuigen met dweilen. Dat is handig voor dagelijks onderhoud, maar het mechanisme verschilt sterk per type.
Passieve dweil (sleepdoek)
De eenvoudigste techniek: een watertank druppelt water op een doek die achter de robot meesleept. Dit haalt lichte vegen en stof weg, maar schrobt niet echt. Ik zie dit als “opfrissen”, niet als vervanging van dweilen.
Vibrerende of roterende dweilen
Geavanceerde robots gebruiken vibratieplaten of twee roterende pads om mechanisch te schrobben. Dat verbetert vlekverwijdering. Sommige modellen kunnen ook automatisch de dweil optillen op tapijt of het tapijt vermijden bij dweilen, via kaartinstellingen en sensoren.
Voor- en nadelen van de technologie in de praktijk
Om je een eerlijk beeld te geven, zet ik de belangrijkste plus- en minpunten van de werking van een robotstofzuiger overzichtelijk bij elkaar.
| Aspect | Voordelen | Nadelen / aandachtspunten |
|---|---|---|
| Navigatie & mapping | Sneller, methodischer, zone-reiniging, no-go zones | Complexer, duurder; camera kan afhankelijk zijn van licht |
| Sensoren | Minder botsingen, trapdetectie, beter rond meubels | Donkere vloeren/reflecties kunnen cliff-sensoren misleiden |
| Reinigingsmechanisme | Dagelijks onderhoud, constant niveau van netheid | Hoeken en diep vuil blijven lastiger dan met klassieke stofzuiger |
| Leegstation | Weinig omkijken, minder vaak stofbak legen | Extra kost, zakken/filters, meer plaats nodig |
| Dweilfunctie | Handig tegen voetstappen en fijn stof | Geen volwaardige vervanging van intensief dweilen |
Wat kost dat mechanisme? Rekenvoorbeeld en prijslogica
Prijs is natuurlijk niet enkel “het merk”, maar vooral: sensoren, navigatie en comfortfuncties (zoals leegstation) maken het duurder. Hieronder geef ik je een realistische manier om ernaar te kijken, met een eenvoudig rekenvoorbeeld.
Indicatieve prijslagen (waar je doorgaans voor betaalt)
| Segment | Typische technologie | Indicatieprijs |
|---|---|---|
| Basis | Random/semi-random, bumper + cliff sensors, eenvoudige borstel | €150–€300 |
| Middenklasse | Systematischer patroon, betere sensoren, appfuncties | €300–€600 |
| Geavanceerd | LiDAR/camera mapping, kamers, no-go zones, betere objectvermijding | €600–€1.000 |
| Premium | Leegstation, geavanceerde dweil (roterend/vibrerend), meer automatisatie | €900–€1.500+ |
Rekenvoorbeeld: kost per jaar inschatten
Stel: je koopt een robotstofzuiger van €650 en je gebruikt hem 4 jaar. Dat is €162,50/jaar puur aankoop. Reken daar verbruik bij: filters en borstels (bijvoorbeeld €40/jaar). Dan kom je rond €202,50/jaar. Met leegstation en stofzakken kan dat bijvoorbeeld nog €20–€50/jaar extra zijn, afhankelijk van gebruik en prijzen.
Merken en technologie: wie staat bekend om wat?
Merknamen zeggen niet alles, maar sommige spelers zijn wel herkenbaar qua focus (mapping, dweilen, service-ecosysteem). Ik geef je hieronder een neutraal overzicht van bekende entiteiten en hun typische accenten, zodat je gerichter kan vergelijken.
| Merk/entiteit | Waar vaak focus op ligt | Handig om op te letten |
|---|---|---|
| iRobot (Roomba) | Breed aanbod, sterke ecosysteemhistoriek | Bekijk per model: navigatie verschilt sterk tussen reeksen |
| Roborock | Vaak sterke LiDAR-mapping en appfuncties | Let op dweilmechanisme per generatie (passief vs geavanceerd) |
| Ecovacs | Veel combinaties met dweilen en docking-opties | Controleer objectvermijding in onafhankelijke reviews |
| Dyson | Focus op zuigtechnologie en engineering | Prijs en vormfactor; kijk naar onderhoudsgemak |
| Xiaomi (ecosysteem) / partners | Vaak goede prijs-kwaliteit in bepaalde modellen | Let op lokale support, garantie en beschikbaarheid onderdelen |
Voor betrouwbare vergelijkingen raad ik je aan om ook onafhankelijke testorganisaties en reviewlabs te raadplegen, zoals Stiftung Warentest, RTINGS of lokale consumentenplatformen. Fabrikantinfo is nuttig, maar praktijkmetingen (randreiniging, haaropname, navigatiefouten) vertellen meestal meer. Als je specifiek wil weten hoe de bekende merken zich tot elkaar verhouden qua navigatie, dweiltechniek en app, bekijk dan ook het overzicht verschil tussen Roborock, Ecovacs en iRobot.
Praktisch advies: zo haal je het meeste uit de werking
Als ik één ding geleerd heb uit robots in echte woningen, dan is het dit: je resultaten hangen evenveel af van voorbereiding en instellingen als van de robot zelf. Met deze tips krijg je doorgaans een merkbaar betere ervaring.
- Kabels en kleine objecten weg: ook met AI-vermijding blijven laadkabels en veters een valkuil.
- Maak no-go zones: rond voerbakjes, speelhoek, losse tapijtranden of een open haardset.
- Plan vaste momenten: wanneer je niet rondloopt; zo kan de robot systematisch werken.
- Onderhoud routine: borstelharen en wielen reinigen voorkomt vermogensverlies.
- Gebruik kamerreiniging: keuken vaker, slaapkamers minder vaak; dat is efficiënter dan “alles altijd”.
Aankoopcheck: welke technologie heb jij écht nodig?
Als je begrijpt hoe het mechanisme werkt, wordt kiezen vooral een kwestie van matchen met je woning. Heb je veel stoelen, smalle doorgangen of lage meubels, dan maken goede mapping en obstakelvermijding vaak het verschil tussen “handig” en “irritant”. Woon je compact en is je vloer relatief open, dan kan een eenvoudiger model (zonder uitgebreide kaartfuncties) prima volstaan.
Let bij het vergelijken vooral op drie punten: (1) je vloertypes (harde vloer vs tapijt, drempels), (2) je “rommelprofiel” (kabels, speelgoed, huisdieren) en (3) je verwachting van gemak (wil je een leegstation, automatische dweilpadlift, schema’s per kamer?). Als je twijfelt vanaf welk prijsniveau die features pas echt zinvol worden, helpt dit artikel over vanaf welk budget een robotstofzuiger echt de moeite waard is om je verwachtingen te kalibreren.
Veelgestelde vragen
Dat hangt af van het type: random modellen “weten” dat niet echt, terwijl mapping-modellen een kaart opbouwen met LiDAR of camera en die combineren met wiel- en IMU-data. Zo kan de robot systematisch zones afwerken en overlap beperken.
LiDAR-robots werken meestal prima in het donker omdat laserafstandmeting geen kamerlicht nodig heeft. Camera-gebaseerde navigatie kan meer afhankelijk zijn van voldoende licht. Basismodellen met bumper en cliff sensors zijn minder gevoelig voor verlichting.
Dat gebeurt vaak bij slechte lokalisatie: wielen slippen op tapijt, sensoren raken vervuild, of de kaart klopt niet meer door verplaatste meubels. Een her-mapping, sensoren reinigen en no-go zones instellen lost dit in veel gevallen op.
Meestal wel, maar je moet rekening houden met geluid, stress en vooral “ongelukjes”. AI-objectherkenning kan helpen, maar is niet foutloos. Ik raad aan om de eerste weken enkel te laten rijden wanneer je thuis bent.
Voor de meeste mensen: ja. Een robot is top voor dagelijks onderhoud, maar voor diepe hoeken, trappen, zetels en grondige schoonmaak blijft een steelstofzuiger of sledestofzuiger handig. De combinatie geeft vaak het beste resultaat.
Dat varieert per woning, maar reken grofweg op regelmatig reinigen en periodiek vervangen afhankelijk van slijtage. Huisdieren en lange haren versnellen dit. Volg de richtlijnen van de fabrikant en kijk vooral naar prestatieverlies als signaal.
Samenvatting
De werking van een robotstofzuiger berust op een slim samenspel van sensoren (obstakels, afgronden, positionering), een reinigingsmechanisme (borstels, zuigmotor, filter en stofreservoir) en navigatie-algoritmes (van random tot LiDAR/camera mapping met SLAM). Hoe geavanceerder de technologie, hoe methodischer en controleerbaarder de reiniging doorgaans wordt. Als je een model kiest dat past bij je vloeren, drempels en woonstijl — en je stelt no-go zones en een onderhoudsroutine in — dan haal je in de praktijk het meeste uit je robot.
Wil je meteen door naar concrete aanraders per type woning en gebruik, bekijk dan ook de beste robotstofzuiger van 2026.



